Showcase
|
Industrial
|
|
Brahms VE: A Collaborative Virtual Environment for Mission Operations
|
Atmosphere helps NASA plan for missions to Mars
|
Results
|
|
|
| An initial prototype of Scenario 2 with one rover was built to prove the mapping between objects and areas (anchors in Atmosphere language) and show that a rover could be driven across the virtual canal. Additional models such as the articulated avatars, geologic sample box and other objects were created in this phase. Figures 9-13 below show an actual space suit used at HMP/FMARS and virtual models of articulated space suit figures in the virtual world for FMARS. |
 |
 |
 |
Figure 9: Actual spacesuit used
at HMP (courtesy Mars Society)
|
Fig 10: Astronaut model with rover and habitat in background
|
Fig 11: Astronaut demonstrating gesture at margin of virtual Lowell Canal
|
 |
 |
|
Fig 12: Astronaut bending down to retrieve sample
|
Fig 13: Astronaut demonstrating the "carrying" motion for the sample box
|
|
|
Putting it all together
|
| Combining the modeling of the FMARS interiors and exteriors, and all objects including avatars, together with a simplified virtual model of the immediate environments of the FMARS habitat, we produced a simulation environment ready to run the Brahms scenario 2 model. Figures 14-17 below show the virtual habitat and areas defined for the simulation, as well as an early example of a rover traverse of the virtual Lowell Canal. |
FMARS and virtual models and camera views
|
 |
 |
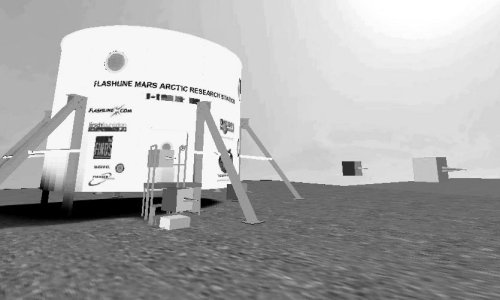
Fig 14: Habitat region showing "areas" defined for Brahms model (colored boxes)
|
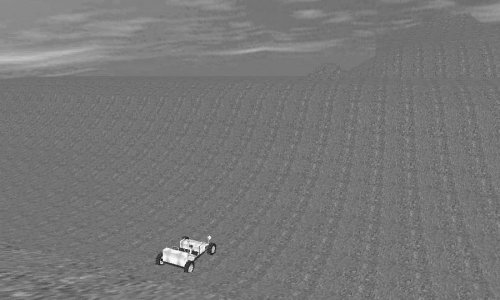
Fig 15: Rover starting traverse of virtual Lowell Canal
|
 |
 |
Fig 16: Rover on traverse, following areas across bottom of canal
|
Fig 17: Rover at other side of canal with habitat in the distance
|
|
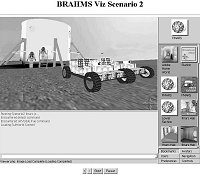
| Figures 18-20 below show the combined simulation running the JavaScript described in Appendices 4 and 5 to produce the final visualization of scenario 2: two astronauts, each boarding rovers, one with a geology kit, traversing the canal where one astronaut dismounts and retrieves a sample, whereupon both astronauts return in their rovers to the habitat. |
 |
 |
 |
Fig 18: Complete Brahms VE Scenario 2 environment showing JavaScript controls, text chat, bookmarks to other models. Scene shows two astronauts and two rovers ready for simulated traverse.
|
Fig 19: Start of simulation showing astronauts boarding rovers (with communication dishes deployed), label changing in the world to indicate action and event scripts.
|
Fig 20: Stage in simulation where rovers arrive at far side of Lowell Canal, one astronaut prepares to dismount and retrieve sample.
|
|